Our research in Extended Autonomy advances heterogeneous swarms, real-time deconfliction, hazard avoidance, and autonomous navigation.
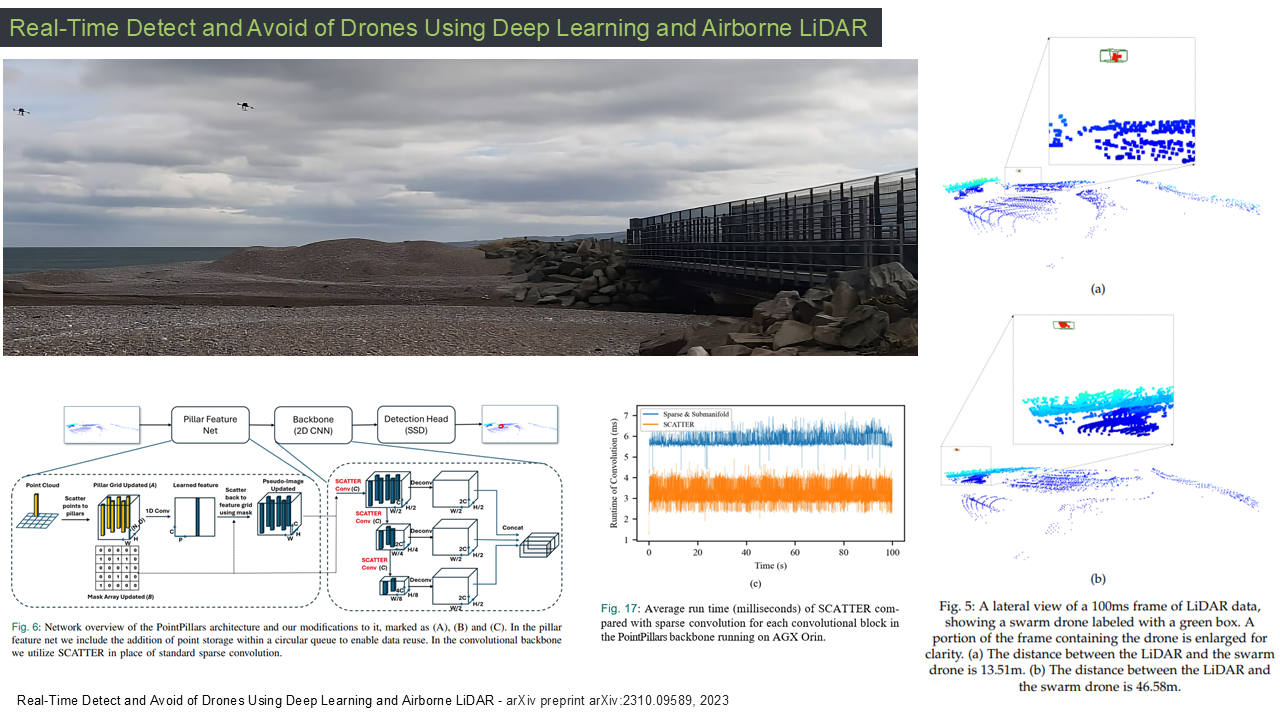
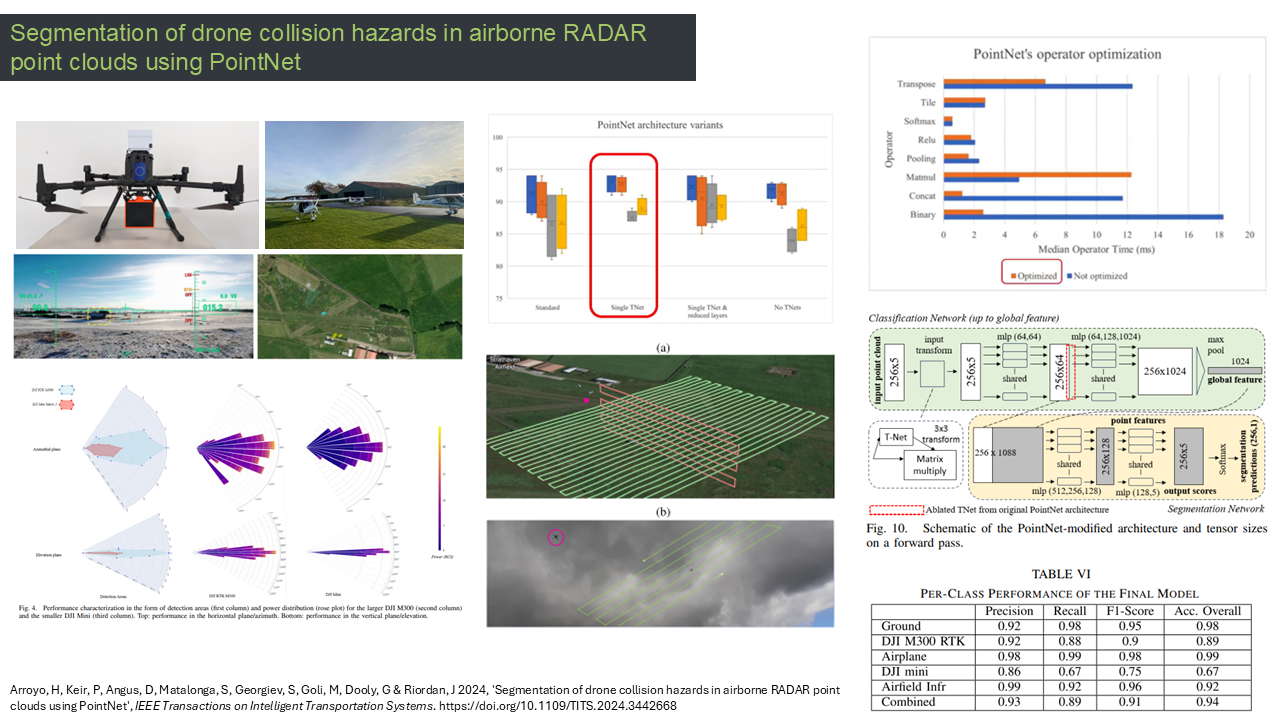
We developed accelerated PointNet and PointPillars models for the first airborne RADAR and LiDAR-based drone detect-and-avoid system.
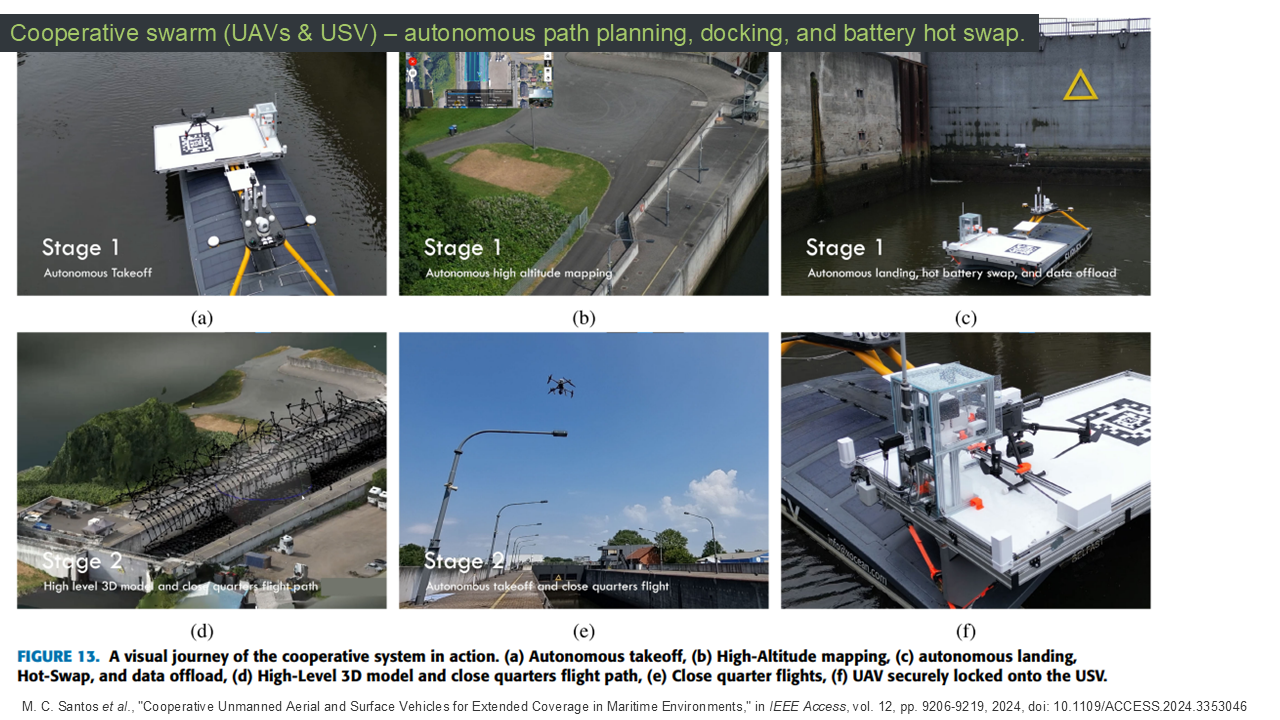
Our work integrates cooperative swarms, digital twins, multi-sensor fusion, SLAM navigation, and AI-driven risk mitigation for autonomous 3D mapping.
Demonstrated in the Port of Hamburg, our methods improved large-scale infrastructure inspection and environmental monitoring efficiency by 20 times.